






DDD Blog
Our thoughts and insights on machine learning and artificial intelligence applications
Welcome to Digital Divide Data’s (DDD) blog, fully dedicated to Machine Learning trends and resources, new data technologies, data training experiences, and the latest news in the areas of Deep Learning, Optical Character Recognition, Computer Vision, Natural Learning Processing, and more.
For Artificial Intelligence (AI) professionals, adding the latest machine learning blog or two to your reading list will help you get updates on industry news and trends.
Get early access to our blogs
What Is LiDAR Data and How Is It Used?
This guide explores what LiDAR data is and how it is used for organizations working with spatial intelligence, and also discusses its various use cases in the real world.

Why Simulation Is Essential for Building Safe, Scalable Autonomous Systems
Explore why simulation has become so critical in autonomous systems, its various forms, where it excels, where it falls short, and how it enables safe and scalable autonomy across the entire system lifecycle.

Data Augmentation Techniques for Robust 3D Point Clouds
We will explore data augmentation techniques for 3D point clouds, how specific transformations alter a model’s internal understanding of geometry, which strategies tend to help or hinder different applications, and how teams can design training pipelines that hold up when data conditions shift unexpectedly.
Complete Data Training Techniques for Robust Pedestrian Detection
In this blog, we will explore how a data training pipeline, from dataset design to augmentation to multi-sensor fusion and domain adaptation, can significantly improve the real-world reliability of pedestrian detectors.

Operational Risk Assessment in Autonomous Fleets: Challenges and Solutions
Learn how operational risk assessment in autonomous fleets works, why traditional safety approaches may not be enough, and what practical methods and tools appear to help organizations manage risk as operations evolve.
How 3D Mapping Advances Perception and Scene Understanding in Autonomy
We will explore how 3D mapping enables deeper, context-aware, and safer perception and scene understanding for autonomous systems, and why this shift is shaping the next generation of mobility technologies.

The Role of Geospatial Analytics in Enhancing Route Safety in Autonomy
Learn how geospatial analytics strengthens route safety for autonomous systems, how it connects perception with planning, and why spatial intelligence is becoming central to the future of safe mobility.

Why Fatigue Detection Is Essential for Autonomous Vehicles
We explore fatigue detection in autonomous vehicles, how it bridges the gap between human attention and machine intelligence, the psychology behind driver fatigue, and the technology that enables real-time detection.

The Evolution of Connected Mobility Solutions (CMS) in Autonomy
This blog will explore Connected Mobility Solutions (CMS) in autonomy, the technologies holding it together, and the challenges that stand in the way of making this vision work on a global scale.

Topological Maps in Autonomy: Simplifying Navigation Through Connectivity Graphs
Let’s discuss how topological maps in autonomy simplify navigation, why they are becoming essential for large-scale autonomous systems, and what challenges still remain in building machines that can understand their world not just by measurement, but by connection.

How Autonomous Vehicle Solutions Are Reshaping Mobility
Explore how autonomous vehicle solutions are redefining mobility through data-driven development, from the foundations of perception and annotation to the real-world transformations they are driving across industries and communities.

Vision-Language-Action Models: How Foundation Models are Transforming Autonomy
Let’s discuss how Vision-Language-Action models are transforming the autonomy industry. We’ll trace how they evolved from vision-language systems into full-fledged embodied agents, understand how they actually work, and consider where they are making a tangible difference.
The Pros and Cons of Automated Labeling for Autonomous Driving
This blog explores automated labeling in the autonomous driving industry, examines the advantages of automation, the associated challenges, and best practices for building hybrid pipelines that combine automation with human validation.
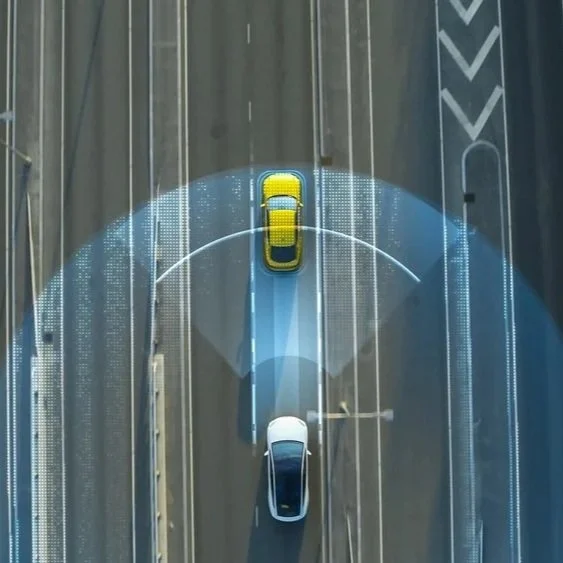
Sensor Fusion Explained: Why Multiple Sensors are Better Than One
Let’s discuss the fundamentals of sensor fusion, why combining multiple sensors leads to more accurate and reliable systems, the key domains where it is transforming industries, the major challenges in implementation, and how organizations can build robust, data-driven fusion solutions.
Long Range LiDAR vs. Imaging Radar for Autonomy
This blog will provide a detailed comparison of long-range LiDAR and Imaging Radar for Autonomy, examining their capabilities, challenges, and the role each is likely to play in the future of safe and scalable autonomy.

Leveraging Traffic Simulation to Optimize ODD Coverage and Scenario Diversity
This article will explore how traffic simulation strengthens the testing and validation of autonomous vehicles by expanding ODD coverage, increasing scenario diversity, ensuring relevance and realism, and integrating into broader safety pipelines to support safer and more reliable deployment.
How Stereo Vision in Autonomy Gives Human-Like Depth Perception
Learn the fundamental principles of Stereo Vision in Autonomy, the algorithms and pipelines that make it work, the real-world challenges it faces, and how it is being applied and optimized across industries to give machines truly human-like depth perception.

How Accurate LiDAR Annotation for Autonomy Improves Object Detection and Collision Avoidance
Explore how LiDAR annotation improves object detection and collision avoidance, the challenges involved, and strategies to improve accuracy.
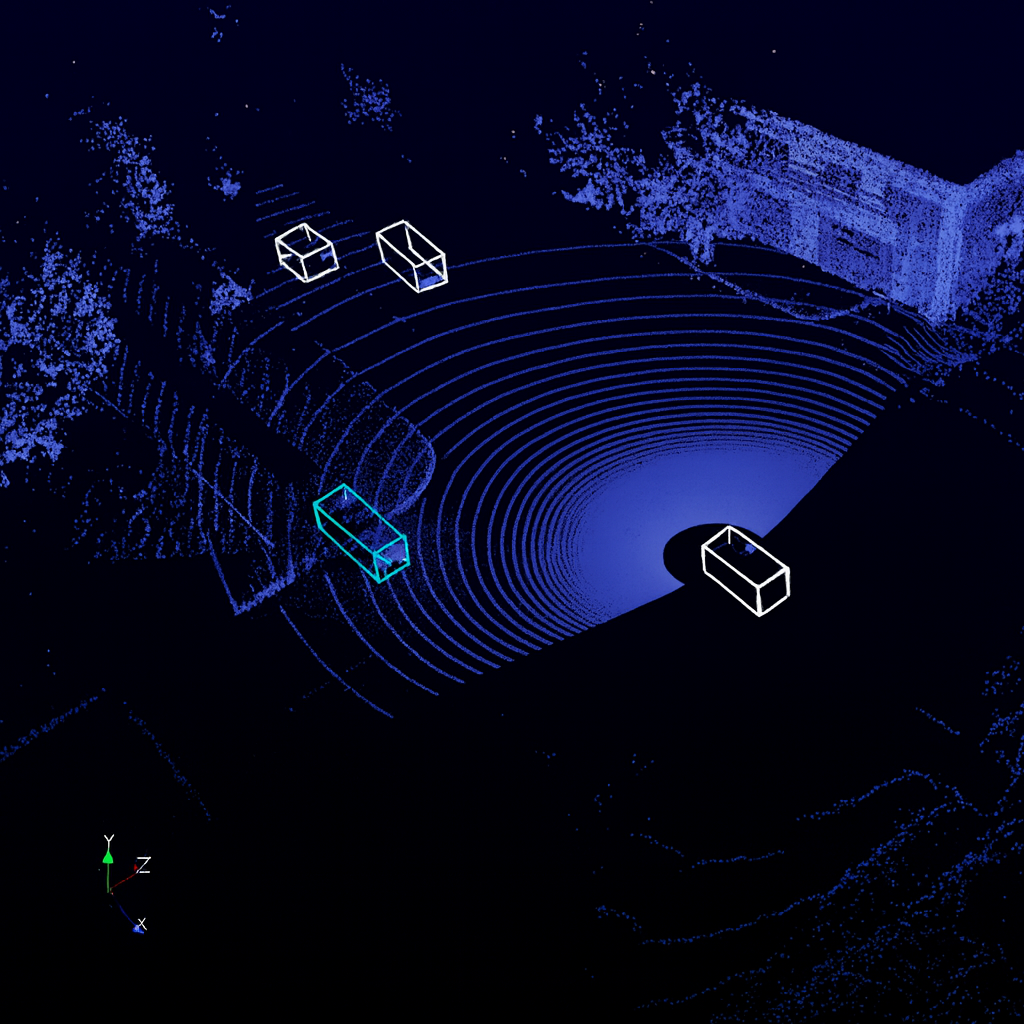
3D Point Cloud Annotation for Autonomous Vehicles: Challenges and Breakthroughs
This blog will explore why 3D point cloud annotation is critical to autonomous driving, the challenges it presents, and the emerging methods for advancing safe and scalable self-driving technology.

HD Maps in Localization and Path Planning for Autonomous Driving
Let’s discuss how HD maps support both localization and path planning in autonomous driving, the advantages they bring, the challenges of maintaining and scaling them, and the future directions that could redefine how vehicles navigate complex environments.
Sign up for our blog today!